Align
The Align module enables highly accurate GOTOs and dead-center target images by utilizing plate-solving. The process starts with capturing an image and plate-solving it to get the exact sky coordinates. Once the coordinates are obtained, the mount is synchronized and then commanded to slew to the correct target position. This cycle repeats until the mount is within a few arcsecs from the target.

It has the following features:
- Manage / Select Optical trains.
- Exposure
- Gain
- Action: Sync, Slew to target or do nothing.
- Binning
- Polar Alignment Assistance
- Capture & Solve
- Load and Slew
- Image Viewer
- Alignment Plot
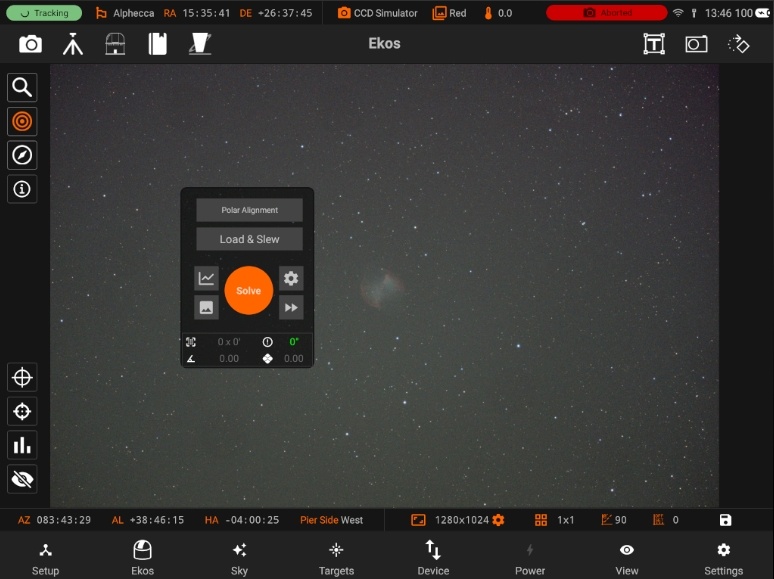
Capture & Solve
To start capturing and solving, just tap on the Capture & Solve button and the StellarMate will take care of the rest. When it's done, you will be able to see the current Alignment capture preview, alignment info on the solution bar on the bottom, and the points on the Alignment plot. The points on the alignment plot have 3 different colors: Red, Yellow and Green. If a point is red, that means that the error is 1.5 times or more above the accuracy value, if it's yellow, that means that the error is between 1 times to 1.5 times above the accuracy value, and finally, if it's green, that means that the error is within the accuracy value. The accuracy value can be changed in the preset settings.

Load and Slew
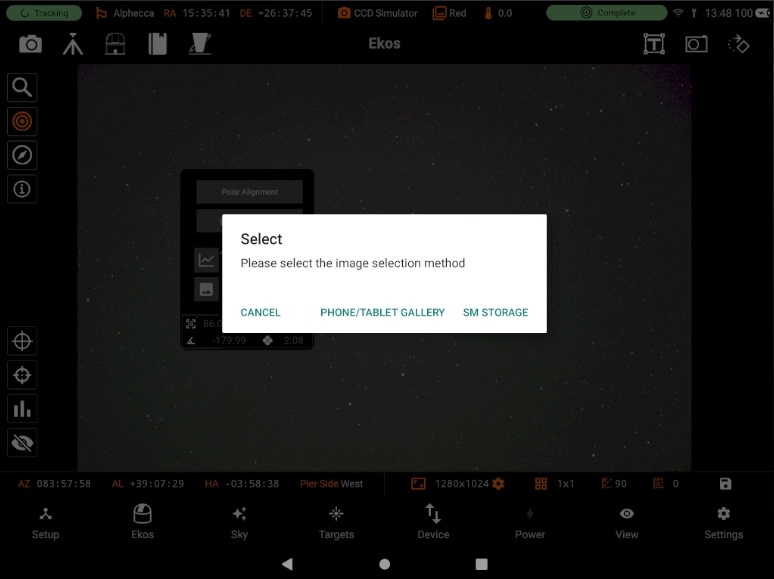
You can load Fits file from the tablet or using Directory browser to access SM device files.
To start a load and slew action by tapping "Phone/Tablet Gallery" and selecting an image to slew to. Stellar-solver is very accurate at this and will be able to slew to object in the image.